Join us on an exciting journey into the heart of Vigo, a unique Spanish port city, as it takes centre stage in the IN2CCAM project. With an industrial port, rugged terrain, and 280 traffic light intersections, Vigo faces distinctive challenges in optimizing traffic management and advancing Connected, Cooperative, and Automated Mobility (CCAM) systems. Explore how Vigo’s Living Lab pioneers innovative strategies to enhance the mobility experience and improve residents’ quality of life.
The northern Spanish port city of Vigo presents unparalleled challenges for the IN2CCAM project due to its distinctive setting, characterised by the industrial activity of its port and a very rugged topography. Within this context, Vigo’s optimal traffic management faces the challenge of supporting the mobility needs of its 600,000 inhabitants and the surrounding population, with 750,000 daily trips throughout the condensed street network. With the high use of private cars and around 280 traffic light intersections, the city has invested considerable resources in ITS systems to optimise the capacity of the existing roads. Under the IN2CCAM project, Vigo aims to seamlessly integrate Connected, Cooperative, and Automated Mobility (CCAM) systems, elevating the city’s overall mobility experience and improving the quality of life for its residents. This Living Lab will leverage the results and previous experience in cutting-edge traffic management technologies to foster novel strategies and investments.

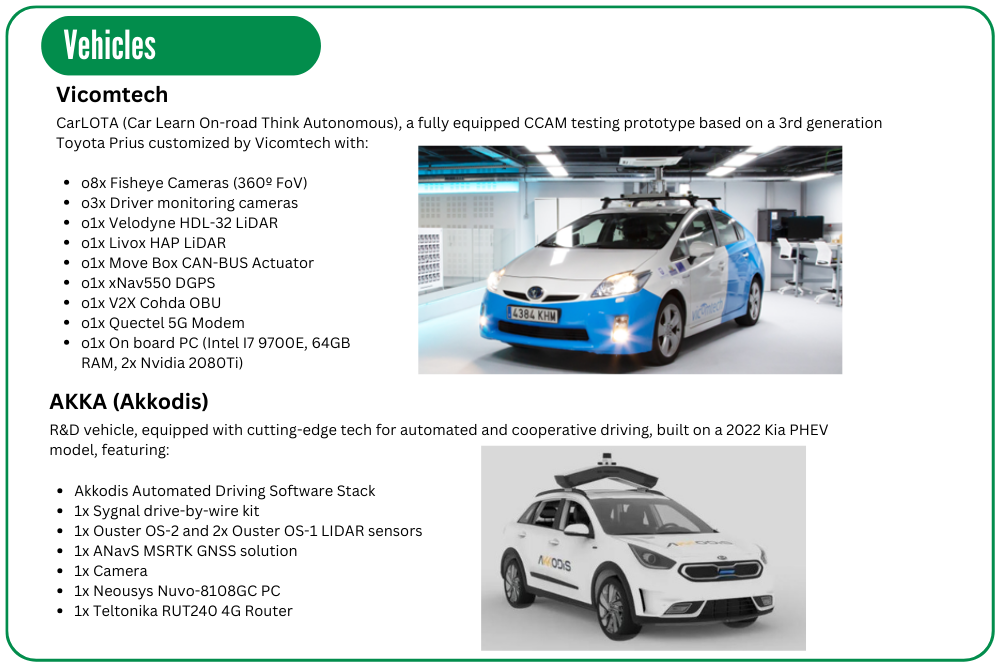
The public and private partner ecosystem of the Vigo Living Lab will ensure the impact of the services. The City of Vigo is directly involved in the project through the Mobility and Safety Area. Its role is crucial as the owner of the Physical and Digital Infrastructure (PDI), enabling the performance of tests in a real-life scenario and as a representative of the citizen’s interests. ETRA-ESYSCA manages the traffic infrastructure, providing HW and SW tools and other technologies and defining the Technical Requirements and CCAM strategies for the project. NeoGLS facilitates V2X connectivity, playing a key role in the development of Vigo C-ITS services, with a deep focus on services for fleet management. Vicomtech and AKKA are the two Autonomous Vehicles’ providers that will be tested in this Living Lab, taking care of in-vehicle data integration.

“The deployment and testing of IN2CCAM use cases in Vigo are a necessary and key step towards future CCAM in urban environment. It will mean a solid basis from which test and build future final user-oriented services within a friendly ecosystem were autonomous mobility, in addition to being feasible and safe, has a positive impact in overall city mobility”.
José Manuel Martínez Oliveira (ESYCSA)
As a first use case, the Vigo Living Lab will foster mutual awareness between CCAM fleets and infrastructure while promoting interaction among CCAM and non-CCAM users in the city, connecting and sharing all the information perceived by different mobility actors for safer and smoother performance. In this sense, traffic infrastructure provides a complete set of C-ITS services (GLOSA, Warnings, traffic information), while autonomous vehicles provide information from their sensors, informing about their intentions (destination, route…) and generating warnings and other valuable information for traffic management.
Once successfully proven, the involved partners will move forward onto a second use case, focused on the development of a management strategy based on V2I interaction for complex urban scenarios, adapted to CCAM, that will ensure safety, efficiency, and positive environmental impact.
In conclusion, the Vigo Living Lab aims to demonstrate that automated and connected vehicle services can work in real traffic, starting with a few vehicles and intersections to build a solid base for connected mobility involving physical and digital infrastructure, connected, and not connected users, human or ‘machine drivers’. If successful, they will pursue larger-scale implementations and the involvement of additional stakeholders such as passenger transport companies.