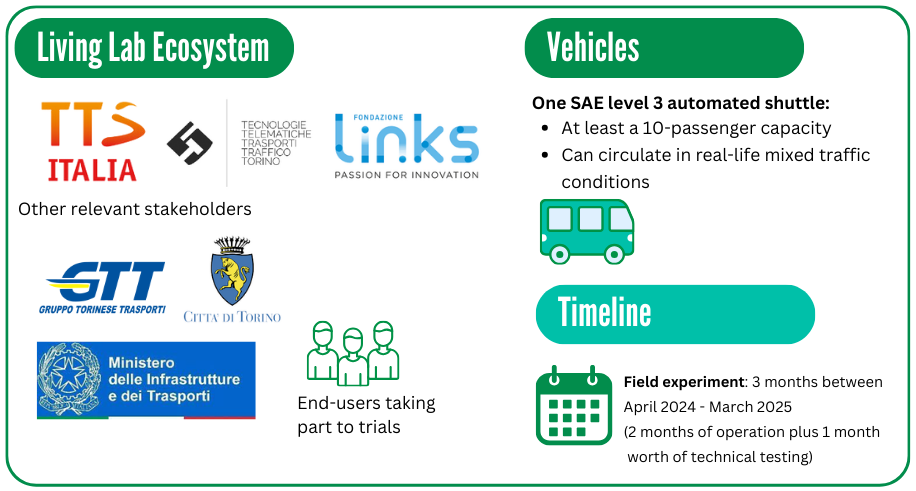
Italy plays a significant role in the IN2CCAM project, coordinated by Politecnico di Bari (POLIBA) and hosting two of its six Living Labs. On this occasion, we explore the Turin Living Lab and how TTS Italia, 5T and Links Foundation will bring CCAM to the city, integrating Connected and Automated Vehicles and enhancing the services and technologies from the Traffic Control Centre to dynamize traffic management.
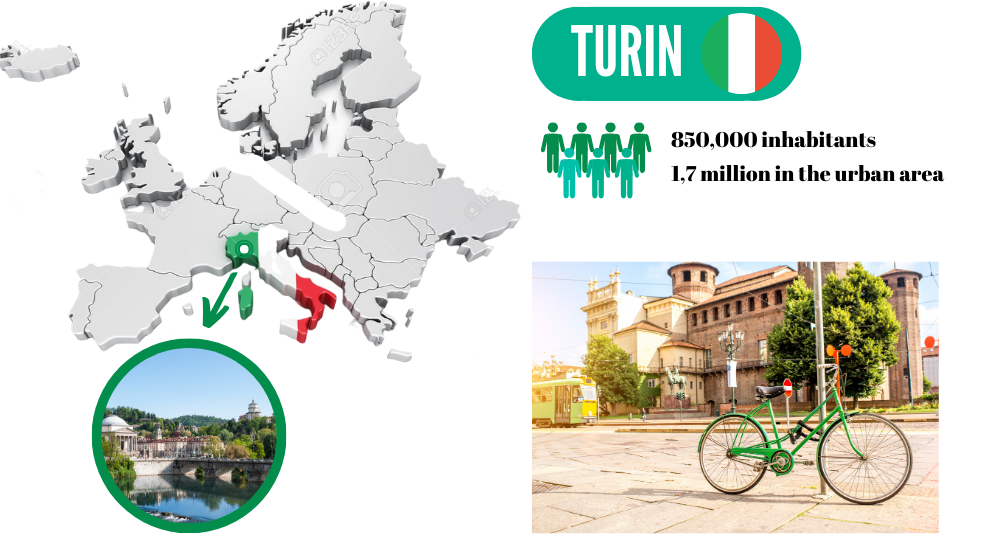
Situated on the western bank of the Po River and surrounded by the western Alps, Turin is Italy’s fourth biggest city, with over 800,000 inhabitants and an urban area that raises to 1,7 million residents. Turin is committed to smoothening and greening mobility. In 2021, the city adopted a Sustainable Urban Mobility Plan (SUMP) aimed at fostering multimodality. The plan bets on greater use of Public Transport, improving the rail, metro and tramway services, and sustainable modes like cycling or walking, reinforcing, and expanding the existing infrastructure and ITS services.
The company 5T, a project partner, is responsible for the city’s Traffic Control Centre (TCC), which provides up-to-date information about the road network and traffic conditions, including roadworks, closures, or traffic congestion. This information is widely disseminated through various channels such as text messages, online platforms, and radio announcements. These updates are also integrated into GPS navigation devices, ensuring access to the most current information for better route planning.
Under the umbrella of IN2CCAM, the project partners TTS Italia, 5T and Links are advancing Turin’s traffic management. Their main goal is to elevate the capabilities of the Control Centre by integrating new services and technologies that enhance Vehicle-to-Infrastructure (V2I) interaction, integrating Connected, Automated Vehicles (CAVs) as a source of information, as well as real-time parking availability information and the activation of Urban Vehicle Access Restrictions (UVAR).
The extensive collection of new data will facilitate more dynamic traffic management and provide optimal re-routing alternatives, enabling making better decisions by warning on the presence of UVAR areas, suggesting optimal speed needed to relieve traffic congestion or using dynamic dedicated lanes for public and private CCAM traffic.
These strategies, supported by the CCAM ecosystem, will be showcased, or simulated within various Connected and Automated Vehicle (CAV) adoption scenarios to assess the impact on the road network, focusing on improved congestion control, enhanced safety for Vulnerable Road Users (VRU) and drivers, and emission reduction. The traffic management strategies won’t solely address individual vehicle routes but optimize the overall traffic scenario through prediction and traffic simulation models, emphasizing a holistic approach to traffic management.
The dynamic re-routing use case will contribute to designing and testing new high-efficiency routing and information services for autonomous and traditional vehicles. These new tools seek to optimize network usage, decrease congestion, and enhance safety—a primary focus for many European cities. Within the context of IN2CCAM, this Use Case holds significant relevance, shaping the future of traffic management and safety measures.
‘The operation of a real service, with real passengers, by an autonomous shuttle in real traffic conditions, will increase people’s awareness regarding CAV and their advantages in terms of safety, efficiency, and environment’.
Lorenzo Valletta (TTS Italia)
The use of automated shuttles in local public transport will contribute to enhancing safety by reducing human errors and accidents. Additionally, integrating automated and connected vehicles minimizes traffic congestion, enhancing transport efficiency and reducing energy consumption and emissions.